沈陽自動化所微型機器人研究獲進展


發(fā)布日期:2022-12-01 來源:
沈陽自動化研究所 瀏覽次數(shù):
500
核心提示:微納米機器人課題組始終致力于小尺寸機器人研究,針對毫米級、微米級、納米級機器人開展了系列研究,在磁驅(qū)動毫米機器人、光驅(qū)動毫米機器人、熱驅(qū)動毫米機器人、氣泡微米機器人、細胞微米機器人、混合驅(qū)動納米機器人等方面取得了系列成果。
沈陽自動化所微型機器人研究獲進展
超疏水微型機器人可以在外界刺激下在水面上高效游動,圍繞這一現(xiàn)象科學家展開研究,探索這一特性在相關領域的應用前景,例如細胞操作、凈化水源等。然而,目前大部分對于超疏水微型機器人的研究均是圍繞單一刺激的驅(qū)動模式,使得超疏水微型機器人的運動和功能在復雜的水環(huán)境中受到限制。
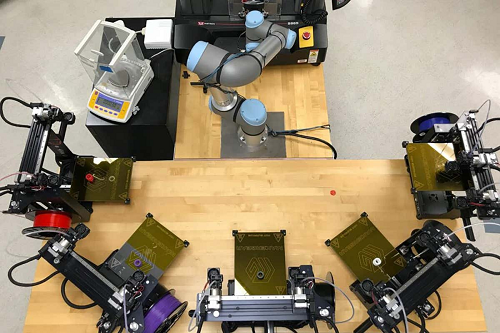
多刺激響應超疏水微型機器人驅(qū)動與控制
針對這一問題,中國科學院沈陽自動化研究所微納米課題組科研團隊開展了創(chuàng)新性研究,利用模板輔助法研發(fā)出多刺激響應超疏水微型機器人,其中超疏水的作用減少了水對微型機器人的阻礙。該微型機器人內(nèi)部具有感知紅外光和磁場的單元,可以儲存化學試劑,使其可在光場、磁場等(即多場驅(qū)動)的控制下在水面快速游動。基于微型機器人的多刺激響應特性,在多場聯(lián)合控制下,微型機器人實現(xiàn)了協(xié)同配合操作。相關研究成果以Multistimuli-Responsive Hydroplaning Superhydrophobic Microrobots with Programmable Motion and Multifunctional Applications為題,發(fā)表在ACS Nano上。
該研究對微型機器人的穩(wěn)定性和環(huán)境適應性進行評估。結果表明,機器人在水面上可以實現(xiàn)預編程的軌跡運動,尤其是在化學試劑的作用和磁場的驅(qū)動下實現(xiàn)了不同軌跡的運動。科研人員進一步探索了在多場驅(qū)動下實現(xiàn)多個機器人運動控制的可能性。研究表明,在光場和磁場作用下,多個機器人實現(xiàn)了協(xié)同配合操作,可以夾取大于自身尺寸較多的結構塊。隨著制備工藝的提升,微型機器人的尺寸有望進一步縮小,在細胞操作、生物組織構建等領域頗具應用前景。
多刺激響應超疏水微型機器人相互配合夾取結構
微納米機器人課題組始終致力于小尺寸機器人研究,針對毫米級、微米級、納米級機器人開展了系列研究,在磁驅(qū)動毫米機器人、光驅(qū)動毫米機器人、熱驅(qū)動毫米機器人、氣泡微米機器人、細胞微米機器人、混合驅(qū)動納米機器人等方面取得了系列成果。
研究工作得到中科院“青年團隊計劃”、國家自然科學基金、機器人學國家重點實驗室等的支持。
工博士智能制造網(wǎng)凡資訊來源注明為其他媒體來源的信息,均為轉載自其他媒體,并不代表本網(wǎng)站贊同其觀點,也不代表本網(wǎng)站對其真實性負責。您若對該文章內(nèi)容有任何疑問或質(zhì)疑,請立即與我們聯(lián)系,本網(wǎng)站將迅速給您回應并做處理。
聯(lián)系電話:021-31666777
新聞、技術文章投稿QQ:3267146135
投稿郵箱:syy@gongboshi.com
[ 行業(yè)資訊搜索 ]
[ 加入收藏 ]
[ 告訴好友 ]
[ 打印本文 ]
[ 違規(guī)舉報 ]
[ 關閉窗口 ]
 在線客服
在線客服 微信客服
微信客服



















絡安全監(jiān)察")


絡110報警服務")
