 在線客服
在線客服 微信客服
微信客服

















咨詢電話
021-80392549

該團隊建造了機器人來模仿使用一對一教學(xué)的巖蟻的行為,其中發(fā)現(xiàn)了更好的新巢穴的螞蟻可以將那里的路線教給另一個人。
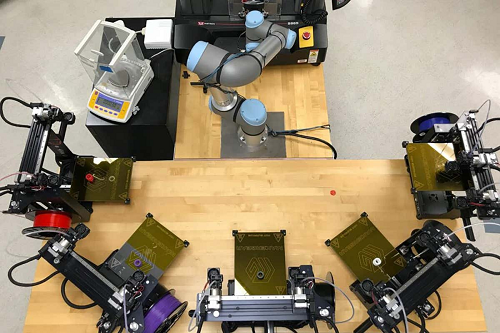
螞蟻帶領(lǐng)其他螞蟻到新的巢穴,稱為串聯(lián)奔跑。

圖片來源:布里斯托大學(xué)的 Norasmah Basari 和 Nigel R Franks
今天發(fā)表在 《實驗生物學(xué)雜志》上 的研究結(jié)果證實,這些螞蟻教學(xué)的大部分重要元素現(xiàn)在都已被理解,因為教學(xué)螞蟻可以被機器取代。
這種教學(xué)過程的關(guān)鍵是串聯(lián)運行,其中一只螞蟻沿著一條通往新巢的路線非常緩慢地引導(dǎo)另一只螞蟻。學(xué)生螞蟻很好地學(xué)習(xí)了路線,它可以找到自己的回家路,然后與另一只螞蟻一起跑到新巢穴,依此類推。
布里斯托爾生物科學(xué)學(xué)院的奈杰爾·弗蘭克斯教授 說:“教學(xué)在我們自己的生活中非常重要,以至于我們花費大量時間指導(dǎo)他人或自學(xué)。這應(yīng)該讓我們懷疑教學(xué)是否真的發(fā)生在非人類動物中。第一個在任何其他動物身上得到嚴格證明的教學(xué)案例是在螞蟻身上。” 該團隊想確定在這種教學(xué)中什么是必要的和充分的。如果他們能建造一個成功取代老師的機器人,這應(yīng)該表明他們在很大程度上理解了這個過程中的所有基本要素。
螞蟻信息素腺體圖。圖片來源:諾拉斯瑪巴薩里
研究人員建造了一個大競技場,因此在螞蟻的舊巢穴之間有相當(dāng)大的距離,故意將其制作成低質(zhì)量的,而新的、更好的巢穴可以由機器人引導(dǎo)。競技場頂部放置了一個龍門架,可以與一個小型滑動機器人來回移動,以便科學(xué)家們可以指導(dǎo)機器人沿著直線或波浪形路線移動。來自工蟻的有吸引力的氣味腺體附著在機器人上,為它提供螞蟻老師的信息素。
弗蘭克斯教授解釋說:“我們等著一只螞蟻離開舊巢穴,然后把裝飾著有吸引力的信息素的機器人別針放在它的正前方。針頭被編程為沿著筆直或蜿蜒曲折的路徑向新巢移動。我們必須允許機器人在旅途中被我們打斷,這樣我們就可以等待后面的螞蟻在它環(huán)顧四周學(xué)習(xí)地標后趕上它。”
“當(dāng)機器人將跟隨螞蟻帶到新巢穴時,我們允許它檢查新巢穴,然后在自己的時間開始回家的旅程。然后我們自動使用龍門架跟蹤返回的螞蟻的路徑。”
團隊發(fā)現(xiàn)機器人已經(jīng)成功將路線傳授給了學(xué)徒螞蟻。螞蟻知道回到舊巢穴的路,不管他們是走彎路還是筆直的路。
弗蘭克斯教授解釋說:“一條筆直的路徑可能更快,但一條蜿蜒的路徑會提供更多的時間,讓后面的螞蟻可以更好地學(xué)習(xí)地標,這樣它就可以像在筆直的路徑上一樣高效地找到回家的路。
“至關(guān)重要的是,我們可以將機器人教過的螞蟻的表現(xiàn)與我們帶到新巢穴所在地但沒有機會學(xué)習(xí)路線的螞蟻的表現(xiàn)進行比較。受過訓(xùn)練的螞蟻更快、更成功地找到了回家的路。”
這些實驗由本科生 Jacob Podesta(現(xiàn)在是約克大學(xué)的博士生)和 Edward Jarvis(也是 Nigel Franks 教授實驗室的碩士生)進行。龍門架編程由 Alan Worley 博士完成,所有統(tǒng)計分析由 Ana Sendova-Franks 博士推動。
他們的方法應(yīng)該可以進一步探討成功教學(xué)所涉及的內(nèi)容。
絡(luò)安全監(jiān)察")


絡(luò)110報警服務(wù)")
