 在線客服
在線客服 微信客服
微信客服
















咨詢電話
021-80392549

機器人視覺技術在零部件運送、拾取與裝卸中的應用探索
本文介紹了三種機器人技術在智能制造中的應用,分別是機器人視覺檢測、機器人零部件運送和拾取以及機器人裝卸。這些技術可以提高生產效率、降低人工成本、減少生產錯誤和提高產品質量,幫助實現智能制造的目標。
一、什么是機器人視覺檢測?
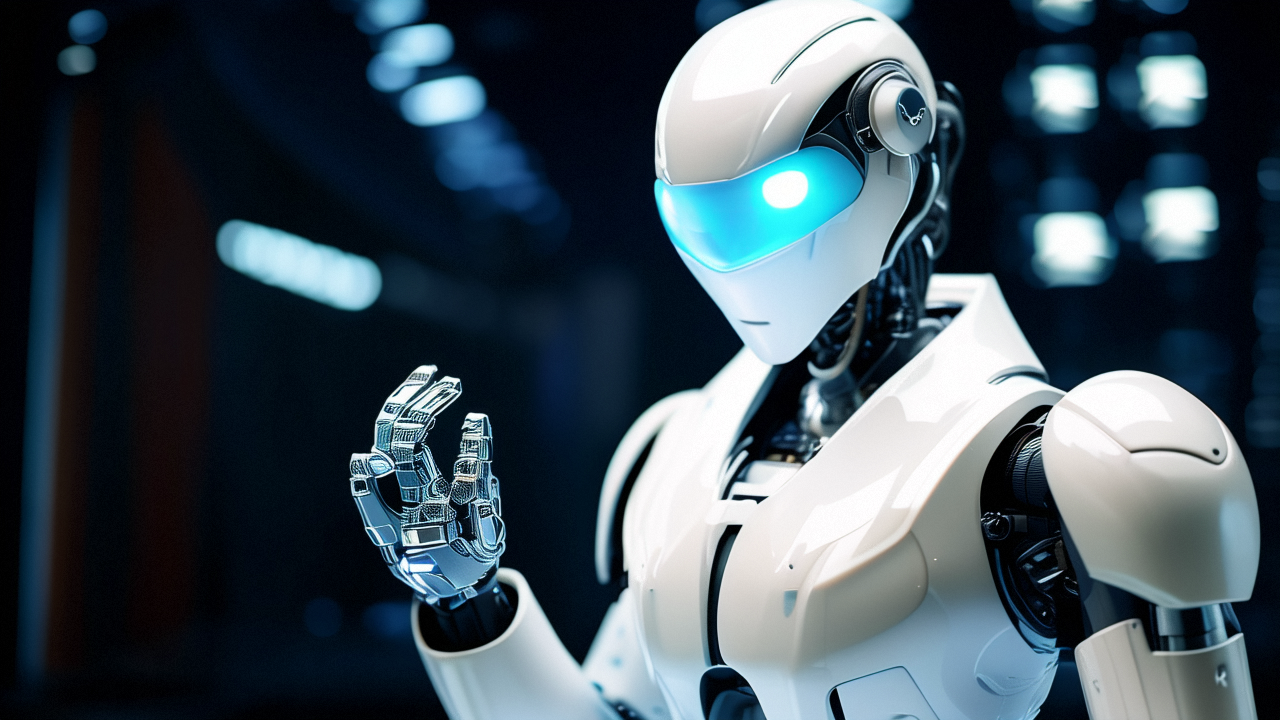
機器人視覺檢測是一種利用機器視覺技術對物體進行檢測和識別的方法。它通過模擬人類視覺系統的功能,將圖像轉換為數字信號,并利用計算機圖像處理技術對圖像進行分析和解釋。
 機器人視覺檢測
機器人視覺檢測
在工業應用中,機器人視覺檢測通常包括以下幾個主要部分:
1.成像設備:如工業相機,用于捕獲場景的圖像。
2.照明系統:確保被觀察物體得到足夠的照明,以便于圖像采集。
3.圖像處理軟件:用于對采集到的圖像進行預處理、特征提取和分析。
4.機器人控制系統:接收視覺系統的輸出,并據此調整機器人的行為。
機器人視覺檢測系統通常包括一個或多個相機、光源、圖像處理單元和控制系統。相機用于捕捉物體的圖像,光源用于照亮物體,圖像處理單元用于分析和解釋圖像,控制系統用于控制機器人的動作和位置。
機器人視覺檢測的應用范圍非常廣泛,包括但不限于:
1.尺寸檢測:機器人視覺檢測可以用于檢測物體的尺寸,例如長度、寬度、高度等。
2.缺陷檢測:機器人視覺檢測可以用于檢測物體表面的缺陷,例如劃痕、裂紋、污垢等。
3.外觀檢測:機器人視覺檢測可以用于檢測物體的外觀特征,例如形狀、顏色、紋理等。
4.物料篩選:機器人視覺檢測可以用于篩選不同形狀和顏色的物料,例如從一堆零件中篩選出符合特定要求的零件。
5.表面缺陷檢測:機器人視覺檢測可以用于檢測物體表面的缺陷,例如裂紋、氣泡、夾雜物等。
總之,機器人視覺檢測是一種高效、準確、自動化的檢測方法,在工業自動化生產中具有廣泛的應用前景。
二、什么是機器人零部件運送和拾取?
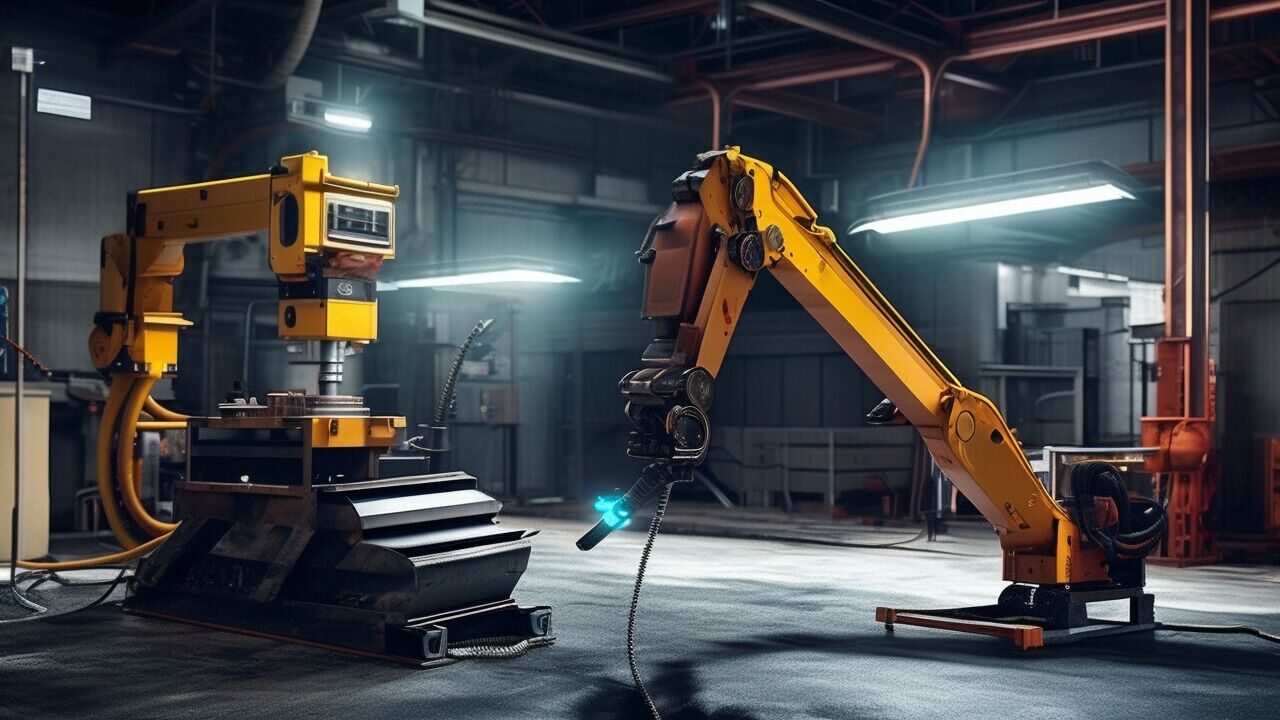
機器人零部件運送和拾取是指使用機器人自動抓取、移動和放置零件的過程。這個過程通常涉及到機器人在生產線上的工作,例如在汽車制造、電子制造和其他制造業中。
機器人零部件運送和拾取
機器人零部件運送和拾取系統通常由以下幾個部分組成:
1.機器人手臂:用于抓取和移動零件。機器人手臂可以是多關節的,也可以是簡單的線性運動手臂。
2.末端執行器:安裝在機器人手臂末端的工具,用于抓取和放置零件。末端執行器可以是真空吸盤、機械夾爪或其他類型的抓取器。
3.控制系統:用于控制機器人的運動和操作。控制系統可以基于計算機或微控制器,通過編程來實現各種操作。
4.傳感器:用于檢測和定位零件的位置。傳感器可以是光學傳感器、紅外傳感器或其他類型的傳感器。
5.輸送機或其他搬運設備:用于將零件輸送到機器人工作區域或將加工好的零件從機器人工作區域移走。
機器人零部件運送和拾取的優勢在于可以提高生產效率、降低人工成本、減少生產錯誤和提高產品質量。此外,機器人還可以在危險或不適合人類工作的環境中工作,例如高溫、高噪音或有毒的環境中。
三、什么是機器人裝卸?
機器人裝卸是指利用機器人技術對各種物品進行自動化搬運和裝配的過程。在這個過程中,機器人能夠準確地識別、定位和抓取物品,將其從一個地方運送到另一個地方,并進行組裝或安裝。這種技術可以提高生產效率,減少人工操作的誤差,降低生產成本,并提高產品質量。機器人裝卸在制造業、物流行業、醫療領域等多個行業中都有廣泛應用。
機器人裝卸
機器人裝卸是一種利用自動化機械系統來完成貨物裝載和卸載任務的過程。在工業生產和物流中,機器人裝卸可以顯著提高效率、降低成本,并降低人工操作帶來的錯誤和安全風險。
以下是機器人裝卸的一些關鍵方面:
1.自動識別:使用傳感器和視覺系統(如條形碼掃描器、RFID標簽或機器視覺)來識別貨物的類型、位置和狀態。
2.機械臂與夾具設計:根據要處理的貨物的大小、形狀和重量,選擇合適的機械臂結構和末端執行器(例如吸盤、抓手或叉車附件等),以實現準確的抓取和放置。
3.運動控制:精確地操縱機器人手臂和其他移動部件,以確保在有限的空間內進行高效的操作。
4.路徑規劃:確定機器人從起始點到目標位置的最佳路徑,同時考慮到環境中的障礙物、其他機器人或其他動態因素。
5.協調與調度:在多機器人環境中,需要對不同機器人進行有效協調,以避免沖突并優化整體工作效率。
6.軟件集成:開發控制系統,以便于機器人與倉庫管理系統(WMS)、企業資源計劃(ERP)或其他生產系統的通信和數據交換。
7.安全措施:實施各種安全機制,包括緊急停止按鈕、光柵、安全圍欄以及其他防止人員受傷和設備損壞的方法。
8.實時監控:通過數據分析和遠程監控技術,持續跟蹤機器人的運行狀態,以便于及時發現和解決潛在問題。
9.維護與升級:定期檢查和維護機器人系統,更新軟件以適應新的需求和技術發展。
機器人裝卸廣泛應用于制造業、倉儲物流、港口碼頭等領域。隨著機器人技術的進步和成本的降低,越來越多的企業開始采用機器人裝卸來提升其運營效率和競爭力。
隨著工業4.0和智能制造的發展,機器人技術正在廣泛應用于各種生產場景。其中,機器人視覺檢測作為一種關鍵的技術手段,使機器人具備了識別和理解環境的能力,大大提升了操作的精度和效率。與此同時,機器人零部件運送和拾取也在制造業中發揮著重要作用,通過精準的抓取和放置策略,實現了自動化生產線上的物料轉移。此外,在物流和倉儲領域,機器人裝卸不僅提高了貨物處理速度,還降低了人工成本和安全風險。綜上所述,機器人視覺檢測及其在零部件運送、拾取與裝卸中的應用,對于推動工業自動化進程具有重要的意義。




